
Consistent State Estimation on Manifolds for Autonomous Metal Structure Inspection
Résumé
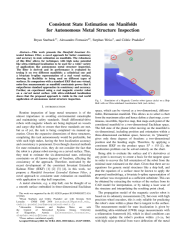
This work presents the Manifold Invariant Extended Kalman Filter, a novel approach for better consistency and accuracy in state estimation on manifolds. The robustness of this filter allows for techniques with high noise potential like ultra-wideband localization to be used for a wider variety of applications like autonomous metal structure inspection. The filter is derived and its performance is evaluated by testing it on two different manifolds: a cylindrical one and a bivariate b-spline representation of a real vessel surface, showing its flexibility to being used on different types of surfaces. Its comparison with a standard EKF that uses virtual, noise-free measurements as manifold constraints proves that it outperforms standard approaches in consistency and accuracy. Further, an experiment using a real magnetic crawler robot on a curved metal surface with ultra-wideband localization shows that the proposed approach is viable in the real world application of autonomous metal structure inspection.
Domaines
Sciences de l'ingénieur [physics]
Fichier principal
 2021 Consistent_State_Estimation_on_Manifolds_for_Autonomous_Metal_Structure_Inspection_.pdf (2.86 Mo)
Télécharger le fichier
2021 Consistent_State_Estimation_on_Manifolds_for_Autonomous_Metal_Structure_Inspection_.pdf (2.86 Mo)
Télécharger le fichier
Origine : Fichiers produits par l'(les) auteur(s)